Omni-directional vehicles have a significant advantage over conventional vehicles with car-like Ackermann steering or the differential drive using two independent wheel motors as in Eve and many of our driving robots. Omni-directional driving allows going forward/backward, but also sideways left/right and turning on the spot. This is especially helpful when having to maneuver in a tight environment such as a factory floor.
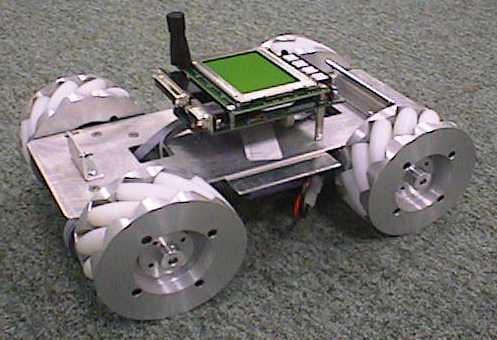
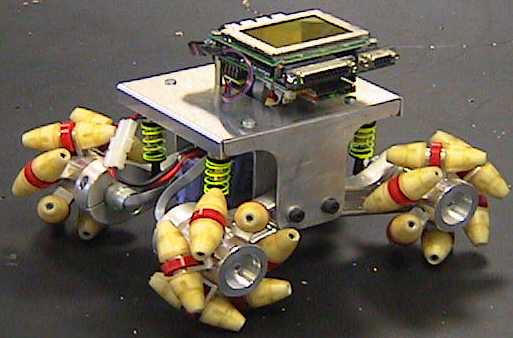
The EyeBot controller drives 4 independent wheels on the omnidirectional robots Omni-1, Omni-2 and Omni-3. These robots use the "Mecanum" wheel design with free rollers around the wheel circumference. Each robot can drive in any direction, i.e. forward/backward, sideways, at an angle, and turn on the spot. The robots are using the EyeBot controller with an add-on module with two additional drivers. For details see the book "Embedded Robotics".
 |
|
|
||
| Omni-Wheelchair | Omni-1 | Omni-2 | ||
| This uses the conventional Mecanum wheel used in Omni-1, and the suspension system in Omni-2, to create a large scale omni-directional robot that is used as a wheelchair. | The conventional Mecanum wheel design with the rollers held at the sides. This is a disadvantage when driving on non-smooth surfaces, because the rims will make contact with the surface. | A new Mecanum wheel design where the rollers are held in the middle. This gives an advantage when driving on general surfaces, together with a suspension system that suspends every wheel individually. |