Final Year Student Projects
Prof. Thomas Bräunl, UWA Engineering
(1) Autonomous Driving for Shuttle Bus and Gator Utility Vehicle
Suitable for students from Comp. Sc./Software Eng., Elec. Eng., Automation & Robotics
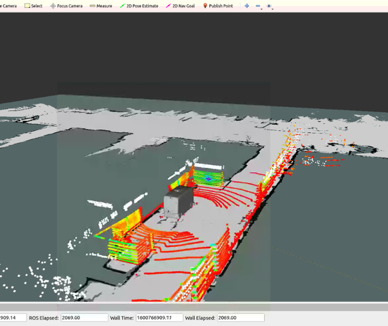
REV has recently acquired TWO EasyMile EZ10 shuttle buses and has been donated a Gator autonomous utility vehicle, for which we are developing our own hardware & software for autonomous driving. The shuttle is equipped with 8 Lidars, 2 cameras, inertial measurement unit (IMU) and GPS. The project operates as a student-led team with support and mentorship from faculty, PhD students and industry professionals.
We are using the latest automotive control hardware with an Nvidia Orin system, which provides real-time sensor processing and accelerated deep learning capabilities. It utilises the Robot Operating System (ROS) with software development in either C++ or Python.
One of the autonomous shuttles operate on the UWA campus, while the second shuttle drives on a public road in Alkimos. Join this leading-edge industry-relevant project!
See details at: http://revproject.com/vehicles/nuway.php
Goals:
- Autonomous navigation across UWA campus
- Autonomous map building, navigation and localisation using SLAM techniques with Lidar and computer vision
- Implementation of a vision sub-system for road and vehicle detection using OpenCV
- Implementation of image detection, classification and end-to-end control using TensorFlow
Prerequisites:
- Completion of ENSC3020 Embedded Systems or CITS2200 Data Structures.
- Good programming skills in C/C++ or Python
- Desirable: AUTO4408 Mobile Robots
- Desirable: Taking 1-week ROS course in Feb.

(2) Electric Hydrofoil
Suitable for students from Comp. Sc./Software Eng., Elec. Eng., Mech. Eng., Automation & Robotics
Hydrofoils are a great concept, as they only use about one fifth of the energy as a conventional watercraft. So we can use a much smaller motor and a much smaller battery than a conventional watercraft for achieving the same speed and driving range.
Hydrofoils are an exciting ride, floating above the water, but they are very unstable and hard to control for novice riders. Therefore, the main goal of this project is to implement an electronic stabilization system that makes hydrofoils easy to ride.
See details at: http://revproject.com/vehicles/hydrofoil.php
Goals:
- Automatic stabilization for height and banking
- GPS Tracking and data transmission of charge status, range, charging events
- MecMechatronic design of foil raising/lowering mechanism
- Web-based front end for data transmission
Prerequisites:
- Depending on topic: programming skills / control / CAD and fluid dynamics


(3) Autonomous Solar Boat
Suitable for students from Comp. Sc./Software Eng., Elec. Eng., Mech. Eng., Automation & Robotics
We have built the mechanics and electronics of an autonomous boat, powered by a solar panel. The goals of this project is to develop software and integrate sensors for a larger marine surveillance task, such as collecting depth data from a lake or conducting water temperature and salinity measurements for a specified route on the river or the ocean.
Goals:
- Mission control for autonomous boat
- Surveying a body of water, such as a lake and conduct depth measurements for every point
- Plan and conduct a full autonomous loop around Rottnest Island
Prerequisites:
- Completion of ENSC3020 Embedded Sys. or CITS2200 Data Structures or equivalent knowledge
- Good programming skills in C, C++ or Python.

(4) Virtual Reality for Mobile Robots
Suitable for students from Comp. Sc./Software Eng., Elec. Eng., Automation & Robotics
We are building VR content for the Oculus Quest-2 based on Unity-3D and the EyeSim simulation system. The task is to transfer EyeSim simulations to run in VR-world on the self-contained Quest systems. The project involves developing new VR demos as well as extending the existing EyeSim system by new robot types (manipulators and drones), as well as simulated sound.
Part of this project included contents generation in form of a computer game that lets students explore the capabilities of mobile robots. We have planned to launch the project outcome on the Oculus web site.
See details at: http://roblab.org/eyesim/
Prerequisites:
- Completion of ELEC3020 Embedded Systems or CITS2200 Data Structures
- Programming experience in C, C++ or Python.

(5) Deep Learning for Mobile Robots
Suitable for students from Comp. Sc./Software Eng., Elec. Eng., Automation & Robotics
We have about 30 small mobile EyeBot robots, based on a Raspberry Pi. We want to implement deep learning methods in TensorFlow for these robots, for which we have a powerful workstation with dual Nvidia GPUs. The goal is to let the robots navigate in a scaled-down traffic scenario, following the rules of the international Carolo-Cup competition.
Tasks include implementing low-level driving routines, automated lane detection, traffic sign recognition, recognition of other vehicles and general obstacles.
See details at: http://roblab.org/eyebot/
Prerequisites:
- Completion of ENSC3020 Embedded Sys. or CITS2200 Data Structures
- Programming skills in C, C++ or Python.

(6) Building Timber Sculptures with Nachi Robot Manipulator
Suitable for students from Comp. Sc./Software Eng., Elec. Eng., Automation & Robotics
We want to use the large Nachi robot manipulator (150kg payload) to create a larger timber structure as an artwork. The robot will pick up timber pieces from a central feeder and then hold them in place for manually fixating them. With this, we will create an artwork piece-by-piece.
An essential part of this project is the creative work to design the overall sculpture structure from repetitive design patterns.
Prerequisites:
- Completion of ENSC3020 Embedded Sys. or CITS2200 Data Structures
- Programming skills in C, C++ or Python.

